NASA Glenn Research Center's 2001 Plan to Land Humans on Mars Three Years Ago (1)
09 September 2017 David S. F. Portree
 August 2014. Image credit: NASA
August 2014. Image credit: NASAIn October 2001, at the 52nd International Astronautical Congress in the European aerospace center of Toulouse, France, nuclear propulsion engineers at NASA's Glenn Research Center (GRC) in Cleveland, Ohio, led by Stanley K. Borowski, Advanced Concepts Manager in GRC's Space Transportation Project Office, described a variant of NASA's 1998 Mars Design Reference Mission (DRM) based on Bimodal Nuclear Thermal Rocket (BNTR) propulsion. The BNTR DRM concept, first described publicly in July 1998, evolved from nuclear-thermal rocket mission designs Borowski and his colleagues had developed during President George H. W. Bush's abortive Space Exploration Initiative (SEI), which got its start with a July 1989 presidential speech commemorating the 20th anniversary of Apollo 11, the first piloted moon landing mission.
NASA's first Mars DRM, designated DRM 1.0 in 1997, was developed by a NASA-wide team during the 1992-1993 period. It was based on Martin Marietta's 1990 Mars Direct mission plan. SEI's demise temporarily halted NASA Mars DRM work in 1994. The civilian space agency resumed its Mars DRM studies after the announcement in August 1996 of the discovery of possible microfossils in martian meteorite ALH 84001. This enabled NASA planners to release their baseline chemical-propulsion DRM 3.0 in 1998. There was no official DRM 2.0, though a "scrubbed" (that is, mass-reduced) version of DRM 1.0 bears that designation in at least one NASA document.
Shortly thereafter, NASA's Johnson Space Center (JSC) in Houston, Texas, which led the DRM study effort, was diverted from DRM work by the in-house COMBO lander study. Left largely to its own devices, NASA GRC developed a pair of DRM 3.0 variants: a solar-electric propulsion (SEP) DRM 3.0 and the BNTR DRM 3.0 discussed here.
In BNTR DRM 3.0, two unpiloted spacecraft would leave Earth for Mars during the 2011 low-energy Mars-Earth transfer opportunity, and a third, bearing the crew, would depart for Mars during the corresponding opportunity in 2014. Components for the three spacecraft would reach Earth orbit on six Shuttle-Derived Heavy-Lift Launch Vehicles (SDHLVs), each capable of launching 80 tons into 220-mile-high assembly orbit, and in the payload bay of a winged, reusable Space Shuttle Orbiter, which would also deliver the Mars crew.
The SDHLV, often designated "Magnum," was a NASA Marshall Space Flight Center conceptual design. The Magnum booster would burn liquid hydrogen (LH2)/liquid oxygen (LOX) chemical propellants in its core stages and solid propellant in its side-mounted boosters. Magnum drew upon existing Space Shuttle hardware: its core stages were derived from the Space Shuttle External Tank and its twin solid-propellant rocket boosters were based on the Shuttle's twin Solid-Rocket Boosters.
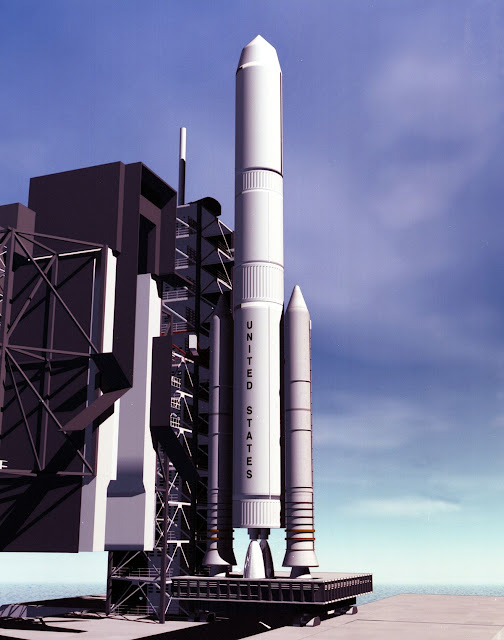 The mighty Magnum, conceptual ancestor of the equally conceptual Ares V and its close relative the Space Launch System, now under development. In NASA Glenn Research Center's 2001 Mars plan, four Magnum rockets would have launched payloads for the first piloted Mars mission in 2011; two more Magnums and a Space Shuttle Orbiter would have launched payloads and crew for the first piloted Mars mission in 2014. Image credit: NASA
The mighty Magnum, conceptual ancestor of the equally conceptual Ares V and its close relative the Space Launch System, now under development. In NASA Glenn Research Center's 2001 Mars plan, four Magnum rockets would have launched payloads for the first piloted Mars mission in 2011; two more Magnums and a Space Shuttle Orbiter would have launched payloads and crew for the first piloted Mars mission in 2014. Image credit: NASASDHLV 1 would launch BNTR stage 1 with 47 tons of LH2 propellant on board. Each BNTR DRM mission would need three 28-meter-long, 7.4-meter-diameter BNTR stages. The BNTR stages would each include three 15,000-pound-thrust BNTR engines developed as part of a joint U.S./Russian research project in 1992-1993.
SDHLV 2 would boost an unpiloted 62.2-ton cargo lander into assembly orbit. The cargo lander would include a bullet-shaped Mars aerobrake and entry heat shield (this would double as the cargo lander's Earth launch shroud), parachutes for landing, a descent stage, a 25.8-ton Mars surface payload including an in-situ resource utilization (ISRU) propellant factory, four tons of "seed" LH2 to begin the process of manufacturing propellants on Mars, and a partly fueled Mars Ascent Vehicle (MAV) made up of a conical Earth Crew Return Vehicle (ECRV) capsule and an ascent stage. The cargo and habitat lander engines would burn liquid methane fuel and LOX.
SDHLV launch 3, identical to SDHLV launch 1, would place into assembly orbit BNTR stage 2 containing 46 tons of LH2 propellant. SDHLV launch 4 would place the unpiloted 60.5-ton habitat lander into assembly orbit. The habitat lander would include a Mars aerobrake & entry shield/launch shroud identical to that of the cargo lander, parachutes, a descent stage, and a 32.7-ton payload including the crew's Mars surface living quarters.
The BNTR stage forward section would include chemical thrusters. These would provide maneuvering capability so that the stages could dock with the habitat and cargo landers in assembly orbit. During flight to Mars, the thrusters would provide each stage/lander combination with attitude control.
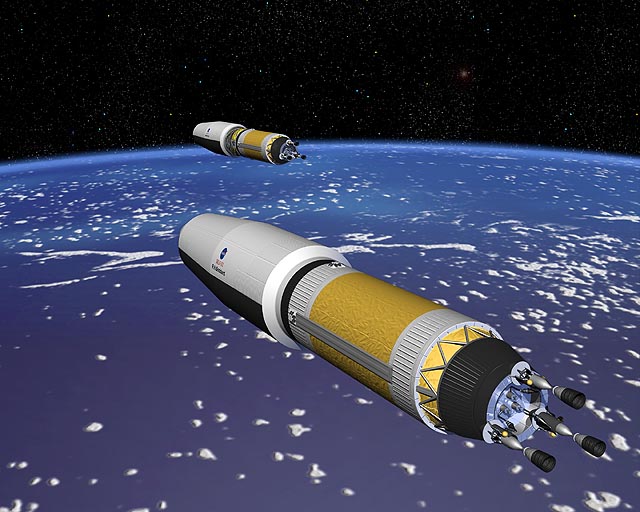 2011: the unmanned BNTR 1/cargo lander and BNTR 2/habitat lander spacecraft orbit the Earth prior to departure for Mars. Image credit: NASA
2011: the unmanned BNTR 1/cargo lander and BNTR 2/habitat lander spacecraft orbit the Earth prior to departure for Mars. Image credit: NASAThe BNTR 1/cargo lander combination would have a mass of 133.7 tons, while the BNTR 2/habitat lander combination would have a mass of 131 tons. Both combinations would measure 57.5 meters long. As the 2011 launch window for Mars opened, the BNTR stages would activate their engines to depart assembly orbit for Mars.
Each BNTR engine would include a nuclear reactor. When moderator elements were removed from its nuclear fuel elements, the reactor would heat up. To cool the reactor so that it would not melt, turbopumps would drive LH2 propellant through it. The reactor would transfer heat to the propellant, which would become an expanding very hot gas and vent through an LH2-cooled nozzle. This would propel the spacecraft through space.
Following completion of Earth-orbit departure, the BNTR engine reactors would switch to electricity-generation mode. In this mode, they would operate at a lower temperature than in propulsion mode, but would still be capable of heating a working fluid that would drive three turbine generators. Together the generators would make 50 kilowatts of electricity. Fifteen kilowatts would power a refrigeration system in the BNTR stage that would prevent the LH2 it contained from boiling and escaping.
Much like the LH2 propellant in BNTR propulsion mode, the working fluid would cool the reactor; unlike the LH2, however, it would not be vented into space. After leaving the turbine generators, it would pass through a labyrinth of tubes in radiators mounted on the BNTR stage to discard leftover heat, then would cycle through the reactors again. The cycle would repeat continuously throughout the journey to Mars.
 2012: Cargo lander/Mars Ascent Vehicle Landing. Image credit: NASA
2012: Cargo lander/Mars Ascent Vehicle Landing. Image credit: NASAAs Mars loomed large ahead, the turbine generators would charge the lander batteries. The BNTR stages would then separate and fire their engines to miss Mars and enter a safe disposal orbit around the Sun. The landers, meanwhile, would aerobrake in Mars's upper atmosphere. The habitat lander would capture into Mars orbit and extend twin solar arrays to generate electricity. The cargo lander would capture into orbit, then fire six engines to deorbit and enter the atmosphere a second time. After casting off its heat shield, it would deploy three parachutes. The engines would fire again, then landing legs would deploy just before touchdown. The GRC engineers opted for a horizontal landing configuration; this would, they explained, prevent tipping and provide the astronauts with easy access to the lander's cargo.
As illustrated in the cargo lander image above and the MAV launch image below, the four MAV engines would serve double-duty as cargo lander engines. In addition to saving mass by eliminating redundant engines, this would test-fire the engines before the crew used them as MAV ascent engines.
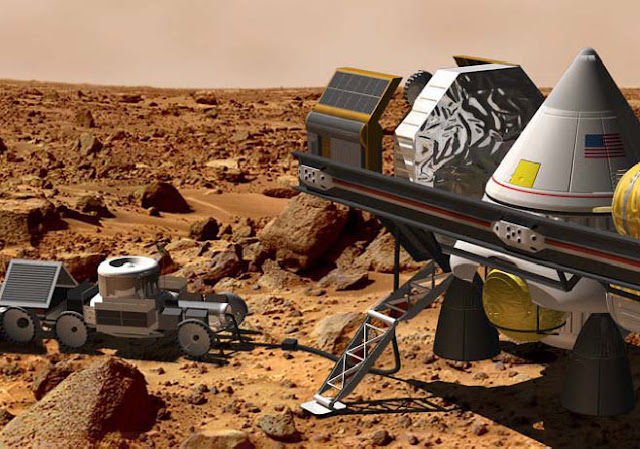 2012: Automated propellant manufacture begins. Image credit: NASA
2012: Automated propellant manufacture begins. Image credit: NASAThe cargo lander, including its MAV component, would touch down on Mars with virtually empty tanks. After touchdown, a teleoperated cart bearing a nuclear power source would lower to the ground and trundle away trailing a power cable. Controllers on Earth would attempt to place it far enough away that the radiation it emitted would not harm the astronauts. The reactor's first job would be to power the lander's ISRU propellant plant, which over several months would react the seed hydrogen brought from Earth with martian atmospheric carbon dioxide in the presence of a catalyst to produce 39.5 tons of liquid methane fuel and LOX oxidizer for the MAV ascent engines.
SDHLV launch 5, identical to SDHLV launches 1 and 3, would mark the start of launches for the 2014 Earth-Mars transfer opportunity. It would place BNTR stage 3 into assembly orbit with about 48 tons of LH2 on board. Because it would propel a piloted spacecraft, its BNTR engines would require a new design feature: each would include a 3.24-ton shield to protect the crew from the radiation it produced while in operation. The shields each would create a conical radiation "shadow" in which the crew would remain while they were inside or close to their spacecraft.
 2013: BNTR 3 and the first Crew Transfer Vehicle components dock automatically in Earth orbit. Image credit: NASA
2013: BNTR 3 and the first Crew Transfer Vehicle components dock automatically in Earth orbit. Image credit: NASA
Thirty days after SDHLV launch 5, SDHLV launch 6 would place into assembly orbit a 5.1-ton spare Earth Crew Return Vehicle (ECRV) attached to the front of an 11.6-ton truss. A 17-meter-long tank with 43 tons of LH2 and a two-meter-long drum-shaped logistics module containing 6.9 tons of contingency supplies would nest along the truss's length. BNTR stage 3 and the truss assembly would rendezvous and dock, then propellant lines would automatically link the truss tank to BNTR stage 3.
A Shuttle Orbiter carrying the Mars crew and a 20.5-ton deflated Transhab module would rendezvous with the BNTR stage 3/truss combination one week before the crew's planned departure for Mars. Following rendezvous, the spare ECRV would undock from the truss and fly automatically to a docking port in the Space Shuttle payload bay. Astronauts would then use the Orbiter's robot arm to hoist the Transhab from the payload bay and dock it to the front of the truss in the spare ECRV's place.
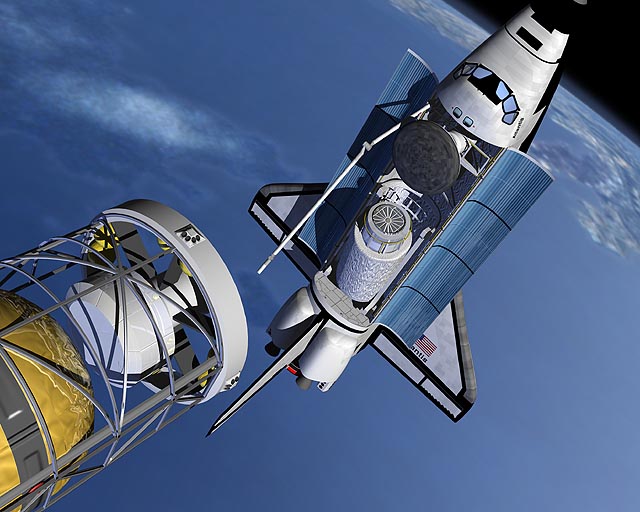 2014: Crew and deflated CTV Transhab arrive on board a Space Shuttle Orbiter to complete CTV assembly. Image credit: NASA
2014: Crew and deflated CTV Transhab arrive on board a Space Shuttle Orbiter to complete CTV assembly. Image credit: NASAThe Mars astronauts would enter the spare ECRV and pilot it to a docking at a port on the Transhab's front, then enter the cylindrical Transhab's solid core and inflate its fabric-walled outer volume. The inflated Transhab would measure 9.4 meters in diameter. Unstowing floor panels and furnishings from the core and installing them in the inflated volume would complete assembly. Transhab, truss, and BNTR stage 3 would make up the 64.2-meter-long, 166.4-ton Crew Transfer Vehicle (CTV).
The CTV's truss-mounted tank and BNTR stage 3 would hold 90.8 tons of LH2 at the start of CTV Earth-orbit departure on 21 January 2014. The truss tank would provide 70% of the propellant needed for departure. In the most demanding departure scenario, the BNTR engines would fire twice for 22.7 minutes each time to push the CTV out of Earth orbit toward Mars.
 Wątek: [SHB] NASA Glenn Research Center's 2001 Plan to Land Humans on Mars Three Years (Przeczytany 1639 razy)
Wątek: [SHB] NASA Glenn Research Center's 2001 Plan to Land Humans on Mars Three Years (Przeczytany 1639 razy)