Pierwotnie 20-11-2009 norton_fmJak SSRMS łączy się z innymi elementami poprzez PDGF?Połączenie następuje między chwytakiem ramienia CanadaArm2 - LEE a specjalnym punktem "cumowniczym" PDGF (power and Data Grapple Fixture)
punkty Grapple Fixture dla CanadaArm i CanadaArm2 są różne - chwytaki mają podobną ale nieco rożniącą się konstrukcję
 PDGF dla CanadaArm2
PDGF dla CanadaArm2PDGF posiada centralnie umieszczony pręt - End Effector, u jego podstawy trzy miedzianego koloru skrzydełka Location Arm Assy, wokół nich czarny okrąg z ząbkami Curvic Interface; 4 gniazda (szary color) na obwodzie czarnego okręgu - pod osłonkami kryją się porty wielopinowe zasilająco-sterujące (otwory w których są ukryte pełnią też rolę gniazd do zaczepienia dodatkowych zatrzasków - o tym później); na dole powyższego zdjęcia znajduje się czarne pole - tzw. target, w który celuje operator CanadaArm2 i który widzi poprzez kamerę na chwytaku.
 Schematyczny rysunek PDGF
Schematyczny rysunek PDGFElementem, który chwyta PDGF jest LEE - Latching End Effector - umieszczony na obu końcach CanadaArm2.
 LEE - Latching End Effector - CanadaArm2
LEE - Latching End Effector - CanadaArm2Ważną rolę w pochwyceniu PDGF przez CanadaArm2 pełni tzw. Snare Mechanism - układ trzech linek rozmieszczonych na obwodzie koła - obrót Snare Mechanism powoduje, że linki krzyżują się zaciskając się na elemencie włożonym między nie - jest nim End Effector z PDGF
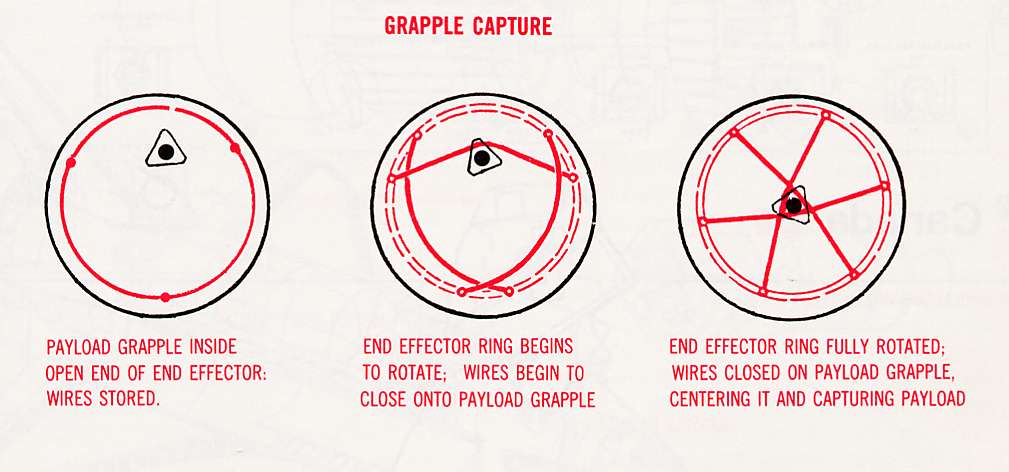 Kolejne etapy zaciskania się Snare Mechanism
Kolejne etapy zaciskania się Snare MechanismW ten sposób można ładnie wycentrować pręt PDGF - czyli End Effector w chwytaku.
po wycentrowaniu przy pomocy Snare Mechanism - cofa się on wgłąb chwytaka - tym samym End Effector i całe PDGF jest przyciągane do LEE.
miedziane skrzydełka (Location Arm Assy) PDGF wchodzą w wyżłobienia w LEE zapobiegając obracaniu się PDGF względem LEE - także ząbki Curvic Interface na PDGF i LEE pełnią tą rolę
kolejnym elementem połączenia między PDGF i CanadaArm2, i tu jest kolejna różnica w stosunku do CanadaArm orbitera, jest zatrzaśnięcie 4 dodatkowych zatrzasków i jednocześnie wykonanie połączeń elektrycznych.
Jak wspomniałem PDGF na obwodzie ma 4 ukryte gniazda i osłony mają ciemnoszary kolor, LEE gdy patrzy się od przodu wokół okręgu z Snare Mechanism ma cztery dość duże wypustki - to tam znajdują się dodatkowe cztery zatrzaski a w każdym z nich po jednym złączu wielopinowym
Po zaciśnięciu Snare Mechanism i wciągnięciu End Effector do wnętrza chwytaka, cztery zatrzaski zaciskają się na otworach, w których znajdują się gniazda elektryczne widoczne na schemacie PDGF; gniazda wielopinowe PDGF i chwytaka LEE łączą się ze sobą zapewniając:
- jeśli PDGF jest portem dokującym CanadaArm2 - gniazda zapewniają zasilanie CanadaArm2, możliwość sterowania wszystkimi jego mechanizmami, przeprowadzanie selftestów, pozwalają na przekazywanie obrazów z kamer CanadaArm2 oraz przekazywanie sygnałów zasilająco-sterujących na drugi koniec ramienia do drugiego LEE
- jeśli PDGF jest portem na przenoszonym przedmiocie - gniazda zapewniają zasilanie tego przedmiotu np. dla grzałek w nim umieszczonych,
- jeśli PDGF jest portem robota Dexture - gniazda zapewniają zasilanie robota i możliwość sterowania nim
wspomniane 4 dodatkowe zatrzaski w LEE CanadaArm2 pozwalają na jeszcze pewniejsze uchwyceniu przedmiotu i przenoszenie ładunków o większej masie niż w przypadku CanadaArm

tu widać LEE od przodu, wewnątrz centralnego otworu widać zaciśnięte linki Snare Mechanism, a na zewnątrz okręgu 4 zatrzaski, w których są złącza elektryczne.
 Wątek: Międzynarodowa Stacja Kosmiczna (artykuły) (Przeczytany 19453 razy)
Wątek: Międzynarodowa Stacja Kosmiczna (artykuły) (Przeczytany 19453 razy)